
Isaalang-alang natin ang paglikha ng isang sinusubaybayang sasakyan na may medyo pangunahing disenyo na maaaring tipunin sa literal ng ilang gabi. Ang buong istraktura ay maaaring halos nahahati sa dalawang bahagi - ang sinusubaybayang chassis at ang elektrikal na bahagi, na magbibigay ng remote control ng makina mula sa remote control.
Paggawa ng tsasis
Hindi gaanong mga materyales ang kakailanganin: ang mga track ay hinihimok ng isang pares ng mga geared na motor, ang batayan ng buong istraktura ay isang maliit na piraso ng makapal na playwud, at kakailanganin mo rin ng ilang mga plastik na gulong kung saan ang mga track ay paikutin. Para sa makina maaari mong gamitin ang halos anumang angkop na laki na geared na mga motor, ang mga "dilaw" ay perpekto, na matatagpuan sa maraming mga tindahan ng mga bahagi ng radyo, o maaari mong bilhin ang mga ito sa Ali, ang gearbox sa mga ito ay nagbibigay ng gear ratio ng 1: 48, na para sa kasong ito ay ang pinakamainam na halaga .

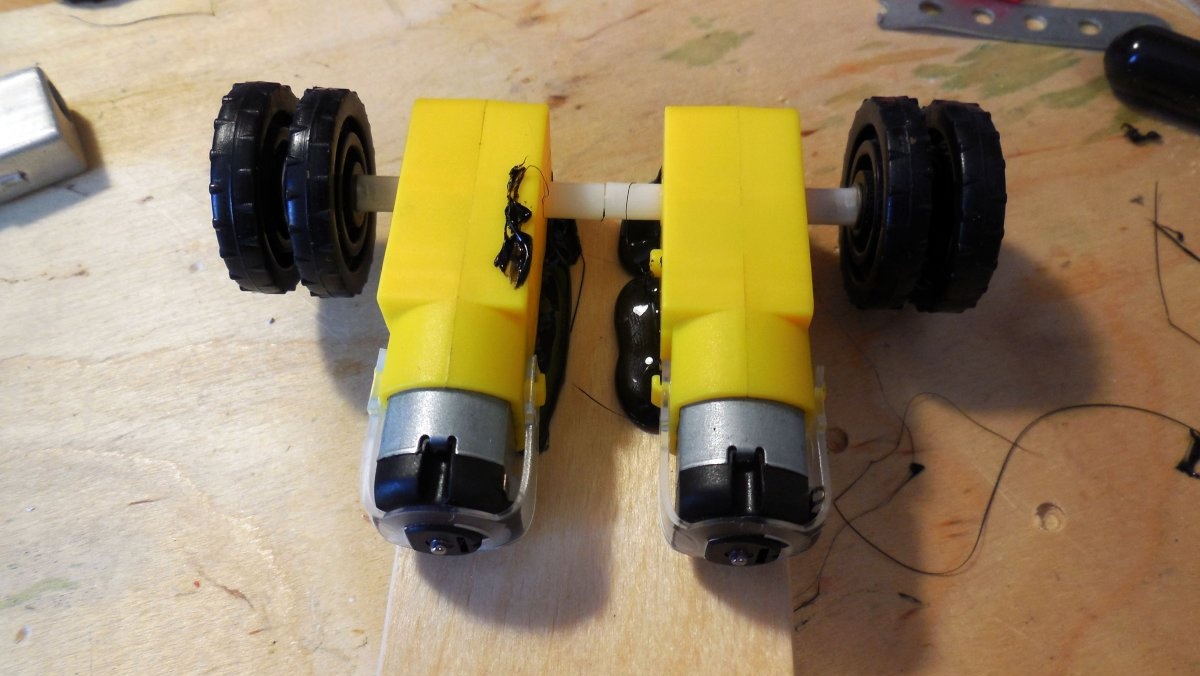
Ang bawat gearbox ay may output sa dalawang shaft, sa magkabilang panig ng katawan - para sa sinusubaybayan na chassis, isang baras lamang mula sa bawat motor ang gagamitin, ang pangalawa ay maaaring ganap na alisin o iwan kung sakaling kailanganin pa rin ang mga motor na ito sa iba pang mga proyekto.Kinakailangan na i-fasten ang mga gulong sa mga shaft - ang pinakamadaling paraan upang gawin ito ay ang pag-screw ng self-tapping screw sa shaft mismo (ito ay guwang sa loob), kaya ang mga gulong ay magkakapit nang maayos. Para sa karagdagang pag-aayos at upang maiwasan ang self-tapping screw mula sa pag-unwinding, maaari mong generously lubricate ang joint na may pandikit. Mangyaring tandaan na ang gulong ay doble - isang puwang na humigit-kumulang 3-4 mm ang ginawa sa pagitan ng bawat gulong; sa hinaharap, ang uod ay aayusin kasama nito.

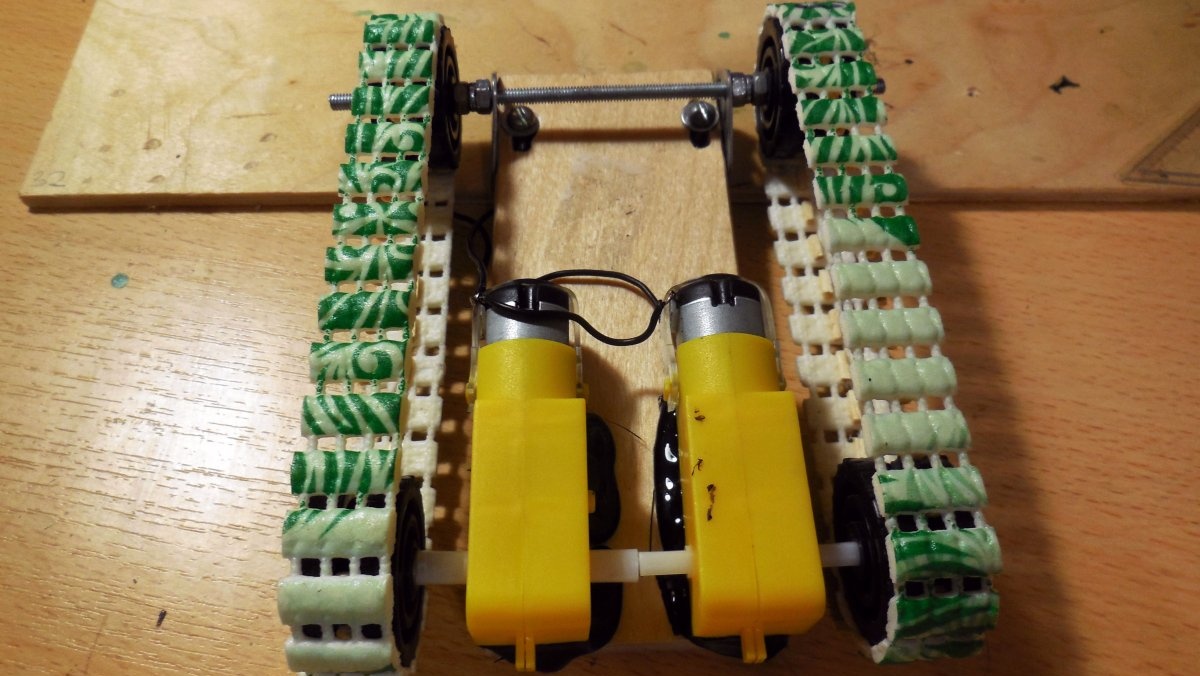
Ang mga motor ay naka-mount sa isang piraso ng matibay na playwud; ang laki nito ay maaaring piliin nang basta-basta, depende sa nais na laki ng makina. Ang mga gearmotor na ito ay hindi nagbibigay ng anumang mga maginhawang lugar para sa pangkabit, kaya inayos ko ang mga ito gamit ang mainit na pandikit - ang mahusay na mga stick ng pandikit ay nagbibigay ng mahusay na kalidad ng koneksyon, tulad ng ipinakita ng karanasan.
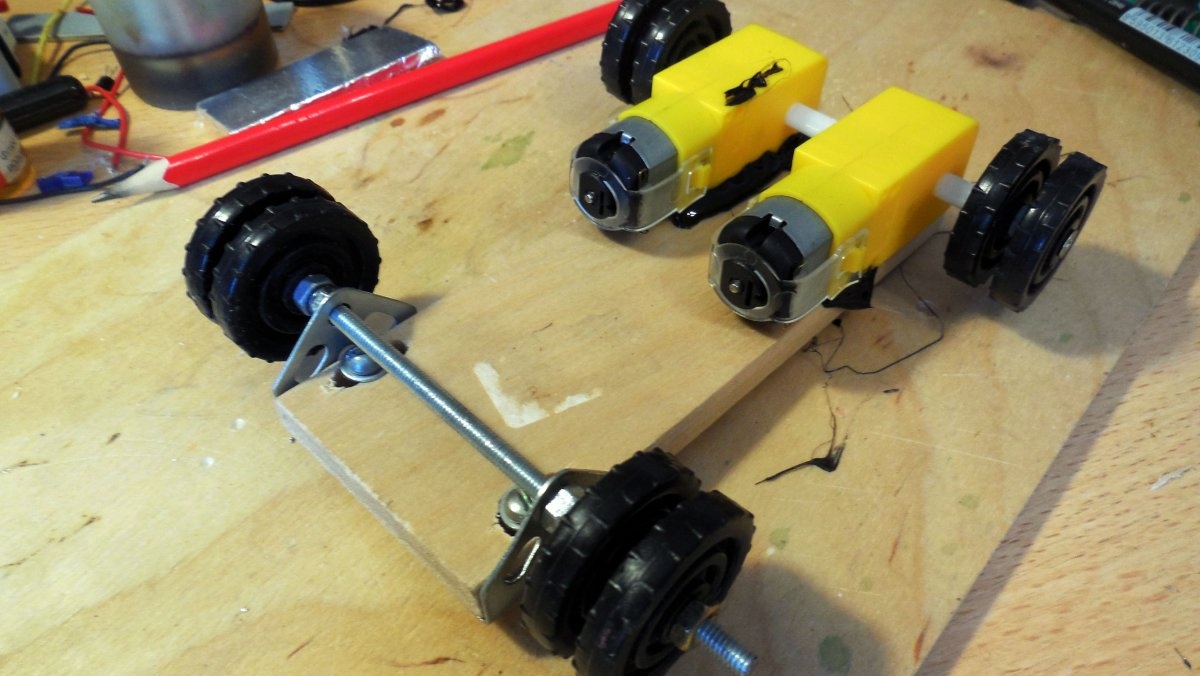
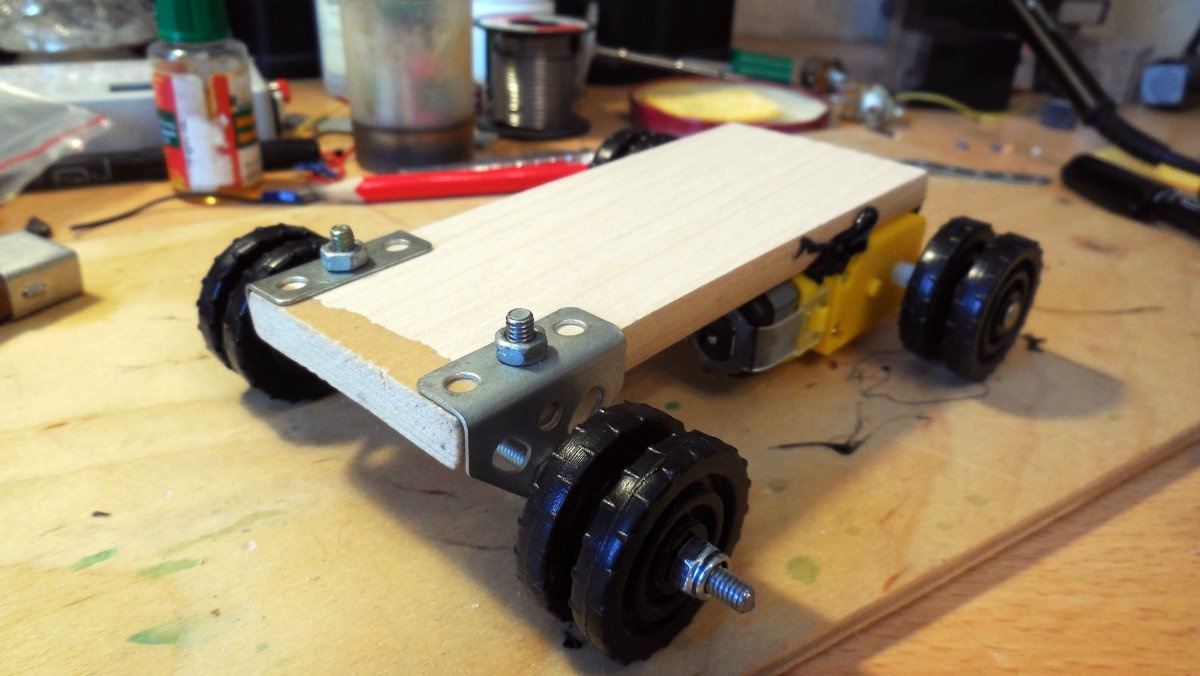
Susunod, sa kabaligtaran ng mga motor, kailangan mong i-secure ang mga sulok para sa ehe ng mga gulong sa harap. Upang gawin ito, lubos kong inirerekumenda ang paggamit ng mga bahagi mula sa set ng konstruksiyon ng bakal ng mga bata - doon maaari kang makahanap ng mga yari na sulok na may mga butas. Kapag nag-drill ng isang butas sa playwud, kailangan mong isaalang-alang na sa hinaharap ay kakailanganin mong ayusin ang pag-igting ng mga track, kaya kailangan mong mag-drill ng isang serye ng mga butas na humigit-kumulang 1-1.5 cm ang haba, na pagkatapos ay konektado sa isa pahaba na puwang. Sa ganitong paraan, ang buong front axle ay lilipat pabalik-balik, na naka-bolted sa lugar.

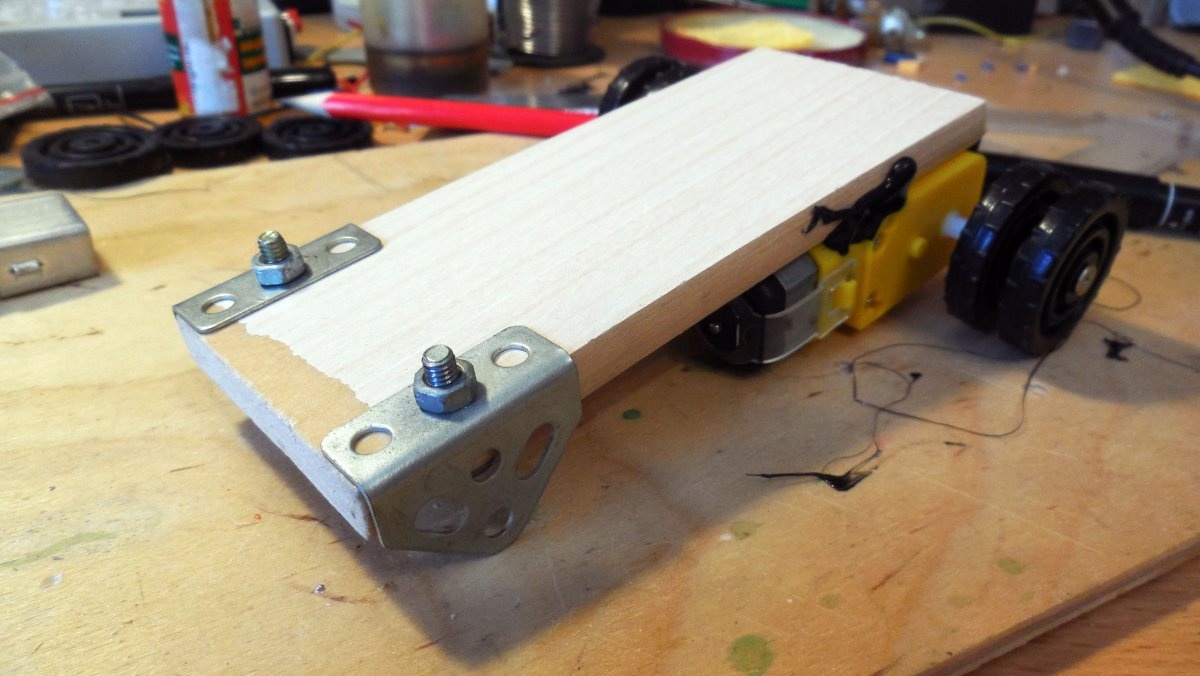
Ang isang pin ay sinulid sa mga butas sa mga sulok; ito ay maginhawa upang gamitin ang M4, nagbibigay ito ng sapat na katigasan at sa parehong oras ay umaangkop sa mga butas sa mga bahagi ng iron constructor. Ang stud ay dapat na mahigpit na naka-secure sa mga sulok; ito ay maginhawang gumamit ng mga locking nuts para dito; hindi sila aalisin sa kanilang sarili kapag ang makina ay nagsimulang gumalaw. Ang parehong mga dobleng gulong ay naka-install sa mga gilid tulad ng sa likuran, na may eksaktong parehong clearance.Ang mga gulong ay dapat na malayang umiikot sa axle; ito ay masisiguro sa parehong locking nuts. Pakitandaan na ang kaliwa at kanang mga gulong ay dapat paikutin nang hiwalay sa isa't isa. Kinuha ko ang mga gulong na ito mula sa parehong set ng konstruksyon ng bakal, ngunit maaari mong i-cut ang mga katulad mula sa plastik o makapal na karton, kung tiklop mo ito sa ilang mga layer at idikit ito nang magkasama.
Paggawa ng mga uod
Mahirap isipin, gayunpaman, ang mahusay na mga track na may mahusay na traksyon ay maaaring gawin mula sa isang PVC bath mat, na matatagpuan sa halos anumang tindahan ng hardware. Ang nasabing alpombra ay binubuo ng maraming nababaluktot na "mga guhit" na konektado sa isa't isa sa pamamagitan ng mga parallel na mga thread, na kung ano ang kinakailangan upang lumikha ng isang uod. Ang isang strip na 1.5-2 cm ang lapad ay pinutol mula sa banig; dapat itong katumbas ng lapad ng mga gulong na ginamit.

Pagkatapos ay kailangan mong ilakip ang tape sa mga gulong na nakakabit sa tsasis at i-cut ito sa kinakailangang haba, pagkatapos ay ang mga dulo ng tape ay nakadikit kasama ng superglue. Matapos matuyo ang kola, maaari mong subukan ang uod sa tsasis at kahit na i-on ang motor - ang uod ay iikot, ngunit mabilis na mahuhulog sa mga gulong.


Upang matiyak na ang uod ay hindi mahuhulog sa mga gulong, kahit na ang hinaharap na sasakyan ay tumakbo sa mga hadlang, kailangan mong gumawa ng matambok na paghinto sa gitna ng uod. Kapag umiikot, mahuhulog sila sa puwang sa pagitan ng mga gulong, na pumipigil sa paglabas ng track. Mayroong maraming mga paraan upang makagawa ng gayong mga paghinto; nagpasya akong idikit ang mga tugma sa bawat "hakbang" ng uod; tulad ng ipinakita ng karanasan, ang pamamaraang ito ay gumagana at may sapat na pag-igting ang uod ay hindi nahuhulog. Ang mga posporo ay pinutol sa mga piraso na 5-6 mm ang haba at nakadikit, tulad ng ipinapakita sa larawan sa ibaba, ang parehong superglue ay ginagamit - tinitiyak nito ang mahusay na lakas ng pagbubuklod sa materyal na PVC mat.


Ang lahat ng parehong mga aksyon ay kailangang gawin sa pangalawang uod.Matapos idikit ang mga posporo, maituturing na handa ang mga track - ngayon ay umaasa na sila sa chassis at maaari na nilang suriin kung paano magmaneho ang hinaharap na kotse sa pamamagitan ng direktang paglalapat ng boltahe mula sa baterya sa parehong mga motor. Kung kinakailangan, kailangan mong ayusin ang puwersa ng pag-igting - ang isang track na masyadong mahina ay iikot o mahuhulog, at ang isang track na masyadong masikip ay paikutin nang mahigpit, na naglalagay ng karagdagang stress sa motor.

Bahaging elektrikal
Sa de-koryenteng bahagi, kakailanganin mo ng ilang board nang sabay-sabay: receiver at transmitter boards para sa pagpapadala ng mga command mula sa remote control, boost converters para ma-power ang mga motor, pati na rin ang "bridge" boards upang payagan ang bawat motor na umikot sa magkabilang direksyon. Ang pangkalahatang pamamaraan ay ang mga sumusunod - ang transmitter board ay mai-install sa remote control, ang receiver board sa chassis ng makina. Kino-convert ng mga Boost converter ang boltahe mula sa mga baterya (3.7 - 4.2 volts) sa antas na 7-8 volts, kung saan papaganahin ang mga motor. Kung ang mga motor ay bumuo ng sapat na bilis nang direkta mula sa baterya, hindi na kailangang i-install ang mga converter. Ang pag-ikot ng mga motor ay kinokontrol ng mga bridge circuit - mga espesyal na circuit na may field-effect transistors na maaaring magbigay ng output na may boltahe ng alinman sa isang polarity o iba pa, depende sa kung aling input (sa 1 o sa 2) ang control signal mula sa matatanggap ng receiver board. Una, tingnan natin ang mga circuit ng transmitter at receiver, ang mga ito ay ipinakita sa ibaba ayon sa pagkakabanggit.

Upang maging tumpak, ang mga circuit na ito ay tinatawag na isang encoder at decoder, at ang receiver at transmitter ay mga yari na RX-TX modules sa dalas ng 433 MHz, na madaling mabili sa Ali o maraming mga tindahan ng mga bahagi ng radyo - Ang bawat isa sa mga module ay may tatlong contact para sa koneksyon - power plus, minus, pati na rin ang isang DATA contact para sa pagpapadala o pagtanggap ng data.Ang mga simpleng circuit na ipinakita sa itaas ay nagbibigay ng data transfer protocol, na nagbibigay-daan sa iyong magproseso ng 5 pagpindot sa pindutan. Upang makontrol ang makina kakailanganin mo lamang ng 4 na channel (pasulong, paatras, kanan, kaliwa), upang ang ika-5 na channel ay mananatiling libre at maaaring magamit para sa anumang layunin, halimbawa, pag-on at pag-off ng mga headlight. Ang mga contact ng TXD at RXD sa mga diagram ay konektado sa mga contact ng DATA ng transmitter at receiver, ayon sa pagkakabanggit; kung hindi, ang mga diagram ay simple at halos hindi nangangailangan ng paliwanag. Ang supply boltahe ng mga circuit mismo ay 3.5-5 volts, gayunpaman, kung nag-install ka ng 78l05 stabilizer (ipinahiwatig ang mga ito sa mga diagram), maaari mong paganahin ang mga ito mula sa isang boltahe na 7 o higit pang mga volts. Ang mga naka-print na circuit board ay nagbibigay ng parehong mga pagpipilian sa kapangyarihan; kailangan mo lamang mag-install ng mga jumper sa mga tamang lugar. Para sa paggamit sa isang makina, ang receiver at ang transmitter ay maaaring direktang paandarin mula sa mga baterya na walang stabilizer. Ang bawat isa sa mga circuit ay may microcontroller - dapat itong i-flash gamit ang naaangkop na firmware; ang firmware ay nasa archive kasama ang mga file ng board.
I-archive na may mga schematics, firmware at mga board:
Ginagawa ang remote control
Bilang isang opsyon, maaari kang gumamit ng yari na remote control mula sa ilang sirang/hindi kinakailangang laruang kontrolado ng radyo, kung may sapat na espasyo sa loob nito upang mai-install ang encoder board. O maaari kang gumawa ng iyong sariling remote control, tulad ng ginawa ko. Bilang isang base, gumamit ako ng isa pang piraso ng playwud, na naka-mount dito ang isang may hawak para sa isang 18650 na baterya, isang encoder board na may module ng receiver, pati na rin ang 4 na mga pindutan, na nag-aayos ng mga ito para sa maximum na kadalian ng kontrol.Pakitandaan na ang encoder board ay naglalaman na ng mga mounting space para sa mga button sa board - ang kanilang pag-install ay hindi kinakailangan, maliban upang suriin ang pag-andar pagkatapos ng pagpupulong. Ang mga pindutan ng pagpapatakbo ay tinanggal mula sa board sa mga wire, tulad ng sa mga litrato sa ibaba.


Pag-mount ng mga electronics sa chassis
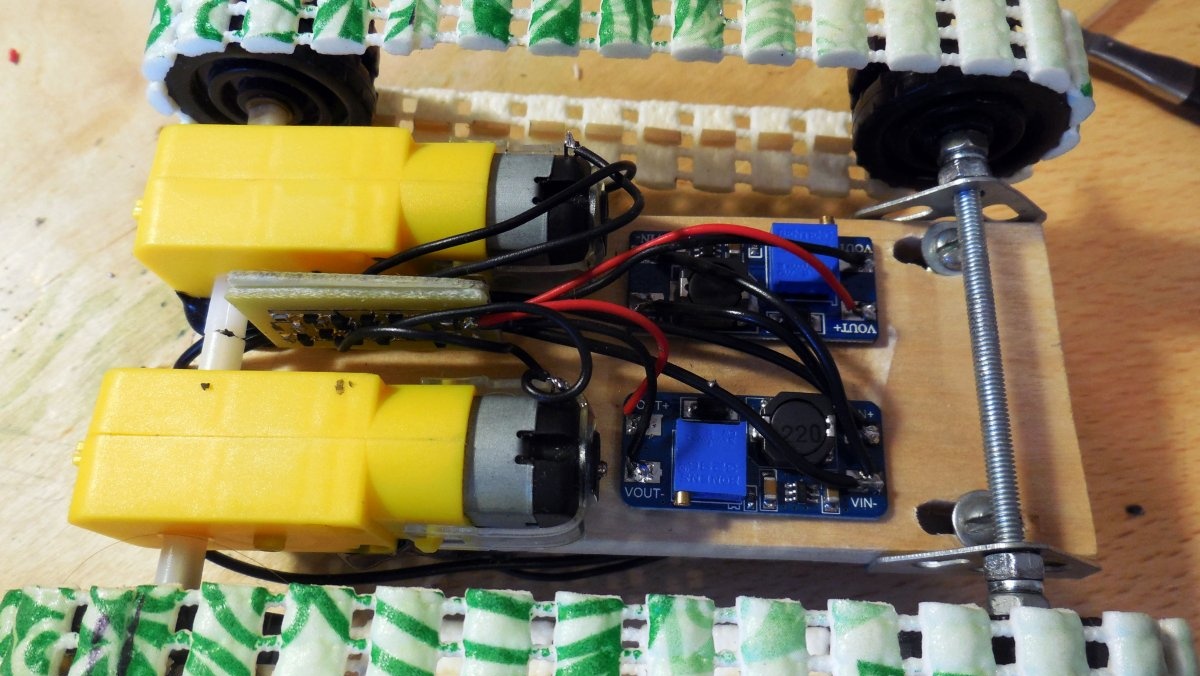
Sa chassis mismo, samakatuwid, bilang karagdagan sa decoder board na may module ng receiver, dalawang "tulay" na board at dalawang converter ang mai-install. Ang magandang bagay tungkol sa paggamit ng dalawang converter, isa para sa bawat motor, ay maaari mong ayusin ang bilis ng bawat track nang hiwalay. Bagaman magkapareho ang mga gearmotors, mayroon pa rin silang ilang pagkakaiba-iba sa mga parameter, kaya kahit na may parehong boltahe ng supply maaari silang makagawa ng bahagyang magkakaibang mga bilis; sa pamamagitan ng pagsasaayos ng boltahe sa output ng mga converter, maaari mong makamit ang parehong bilis. Ang isang pagbaluktot sa mga bilis, kahit na isang maliit, ay hahantong sa katotohanan na ang kotse ay hindi magmaneho nang diretso, ngunit may bahagyang pagliko. Sa ibaba sa larawan maaari mong makita ang lahat ng mga board na kinakailangan para sa pag-install sa chassis.

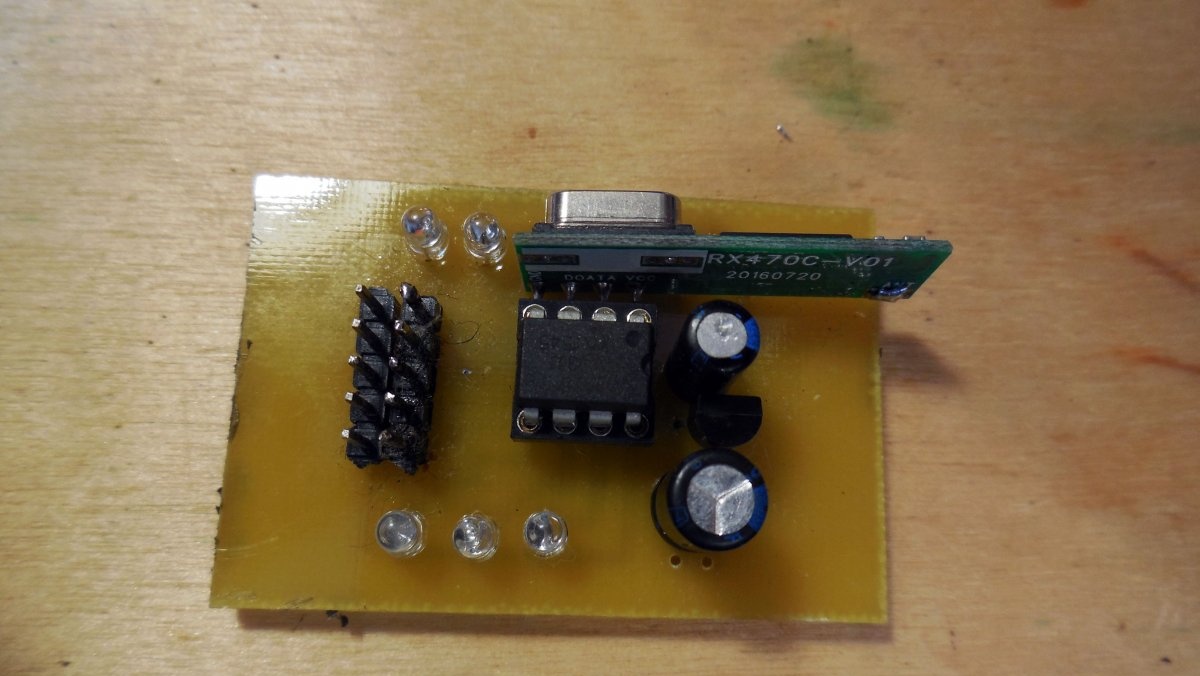
Detalyadong larawan ng decoder board. Mangyaring tandaan na ito, tulad ng encoder board, ay may ilang karagdagang mga power supply capacitor - tiyak na hindi sila magiging labis sa mga device na may mga microcontroller.
Pagpupulong ng circuit ng tulay
Tila kung bakit kailangan ang ilang uri ng circuit ng tulay, dahil sapat lamang na mag-aplay ng boltahe sa mga motor gamit ang isang susi. At talagang hindi kinakailangan kung ang kotse ay hindi nangangailangan ng reverse gear - at ipinapakita ng pagsasanay na kung wala ito ay hindi ito kawili-wili. Kaya, kinakailangan na mag-ipon ng isang maliit na karagdagang circuit na magbibigay ng pagbabago sa polarity para sa motor. Ang polarity ay nagbabago - ang direksyon ng paggalaw ay nagbabago.

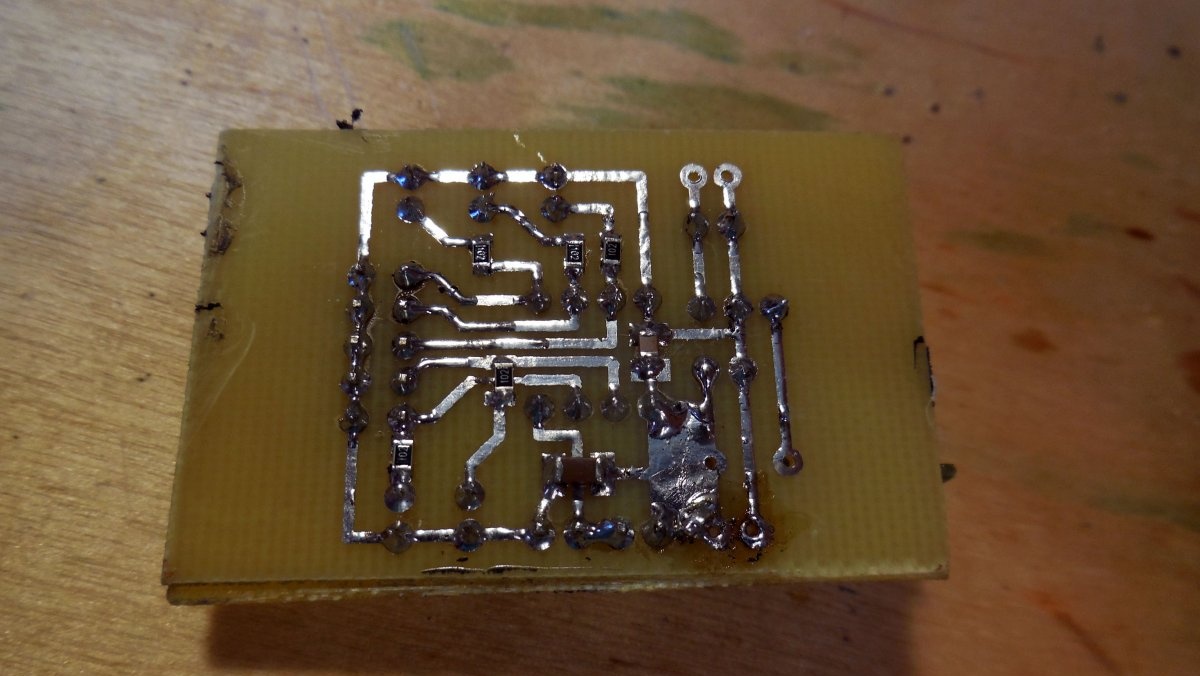
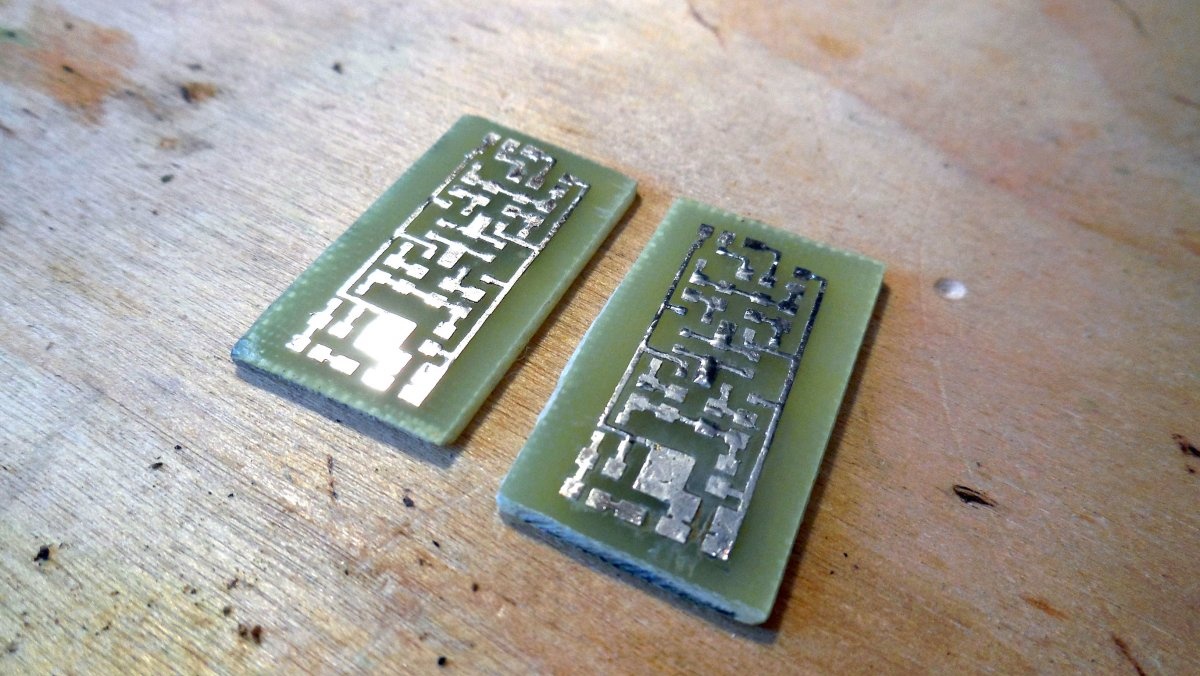
Ang motor ay konektado sa circuit na ito, at naglalaman din ito ng dalawang input - in1 at in2, ilapat ang 3-5 volts sa isang input - ang motor ay umiikot sa isang direksyon, ilapat ang 3-5 volts sa isa pa - ang motor ay umiikot sa isa pa. direksyon. Kung ang boltahe ay hindi ibinibigay sa alinman sa input, o inilapat sa parehong mga input nang sabay-sabay, ang motor ay hindi umiikot, ito ang simpleng lohika ng operasyon. Mayroong 4 na field-effect transistors sa circuit na magpapalipat-lipat sa motor, kaya dapat na idinisenyo ang mga ito para sa isang sapat na mataas na kasalukuyang. Dalawa sa kanila ay N-channel, maaari mong gamitin ang AO3400, ang iba pang dalawa ay P-channel, AO3401 ay angkop. Gayundin sa diagram mayroong dalawang bipolar NPN transistors; BC847 o anumang iba pang katulad na mga ito ang gagawin. Upang hindi kumuha ng maraming espasyo sa chassis, inirerekumenda ko ang pag-assemble ng circuit na ito gamit ang mga bahagi ng SMD. Diodes - anumang gusto mo, halimbawa, 1N4148W. Ang power input ng circuit na ito (itinalaga bilang 12 V) ay ibinibigay ng boltahe mula sa converter. Mangyaring tandaan na ang circuit ay dapat na tipunin sa dalawang kopya - para sa kaliwa at kanang mga motor, ayon sa pagkakabanggit, sila ay pinapagana mula sa isa at mula sa pangalawang converter. Nasa ibaba ang mga larawan ng mga naka-assemble na board.

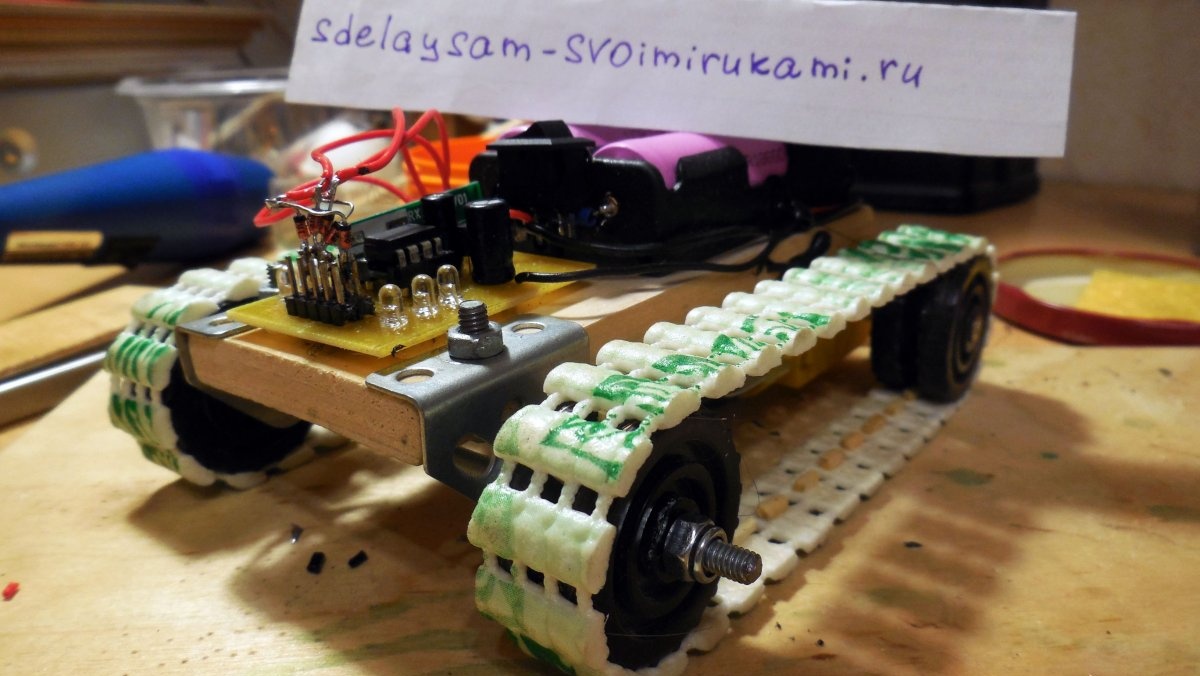
Ngayon ay maaari kang magpatuloy nang direkta sa pag-install - at ang unang hakbang ay ang pag-install ng isang pares ng mga may hawak para sa 18650 na mga baterya sa tuktok ng chassis; lahat ng mga electronics ay papaganahin mula sa kanila; ang mga baterya ay konektado nang magkatulad.

Sa harap ng mga baterya, sa harap na bahagi, ang isang decoder board ay naka-install; maaari itong agad na konektado sa pamamagitan ng isang switch sa mga contact ng mga may hawak. Para sa kaginhawahan, ang board na ito ay mayroon ding 5 mga LED – kapag pinindot mo ang mga remote control key, ang mga kaukulang key ay sisindi mga LED.

Ang isang pares ng mga converter at isang pares ng mga bridge board ay nakakabit sa ibabang bahagi, sa ilalim ng chassis.Ang lahat ay agad na konektado sa pamamagitan ng mga wire - ang mga input ng mga converter sa pamamagitan ng isang switch sa mga may hawak, ang mga output ng mga converter sa kapangyarihan ng mga bridge board, at ang mga output ng mga tulay, sa turn, sa mga motor. Dapat itong isaalang-alang na ang mga motor sa ilalim ng pagkarga ay maaaring kumonsumo ng isang malaking kasalukuyang; nang naaayon, sa input ng mga converter, ang kasalukuyang natupok ay humigit-kumulang 2 beses na mas malaki at sa ilang mga sandali ay maaaring umabot sa 1-1.5 amperes, kaya kailangan mong supply ng kapangyarihan na may medyo makapal na mga wire.

Ang huling, huling yugto ng pagpupulong ay nananatili - kailangan mong ikonekta ang mga output ng decoder (4 sa 5 output ang gagamitin) sa mga input ng tulay (in1, in2), upang kapag pinindot mo ang ilang mga key sa remote control, ang makina tumutugon sa nais na paraan. Namely:
- Ang pagpindot sa "pasulong" - ang parehong mga motor ay umiikot sa parehong direksyon.
- Ang pagpindot sa "likod" - ang parehong mga motor ay umiikot sa kabaligtaran na direksyon.
- Ang pagpindot sa "kanan" - ang kaliwang motor ay umiikot pasulong, ang kanang motor ay umiikot paatras, habang ang makina ay umiikot nang pakanan sa lugar.
- Ang pagpindot sa "kaliwa" - ang kanang motor ay umiikot paatras, ang kaliwang motor ay umiikot pasulong, ang makina ay umiikot sa counterclockwise.
- Sabay-sabay na pagpindot sa "pasulong" at "kanan" - ang kaliwang motor ay umiikot pasulong, ang kanan ay nakatayo, kaya ang isang makinis na pagliko ay nangyayari.
- Ang sabay na pagpindot sa "pasulong" at "kaliwa" ay magkatulad, ngunit sa kabilang direksyon.
Upang ipatupad ang gayong lohika, kinakailangan na ikonekta ang mga output ng decoder sa mga input ng tulay tulad ng ipinapakita sa ibaba.
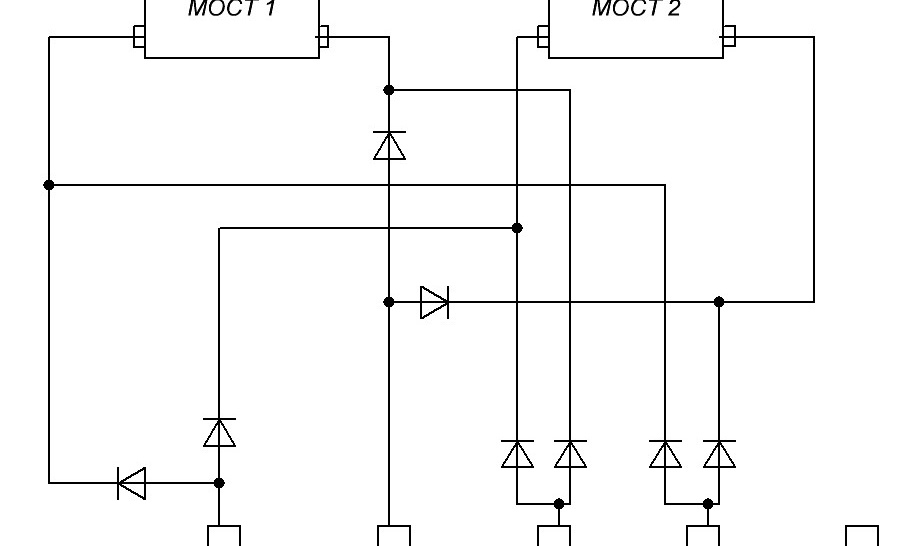
Ang mga output ng decoder ay ipinapakita sa ibaba, na ang isa sa mga ito ay libre at maaaring magamit para sa iba pang mga aksyon. Ang mga diode dito ay maaaring gamitin sa parehong 1N4148, na ibinebenta sa pamamagitan ng pag-mount sa ibabaw nang direkta sa mga output ng decoder.
Mga pagsubok
Sa puntong ito, ang pagpupulong ng makina ay nakumpleto, maaari mong ipasok ang mga baterya at suriin ang operasyon. Sa kasong ito, hindi magiging mali na suriin ang kasalukuyang pagkonsumo - sa kawalan ng mga utos mula sa remote control, dapat itong maliit, mga ilang sampu ng mA. Ang hanay ng remote control ay nakasalalay sa mga module ng receiver at transmitter na ginamit - kadalasan ay nagbibigay sila ng isang maaasahang lugar ng pagtanggap na humigit-kumulang 20-30 metro sa mga kondisyon ng lunsod, na sapat na upang makontrol ang makina. Ang mga antena ay makakatulong upang makabuluhang taasan ang saklaw; maaari kang kumuha ng mga piraso ng tansong wire na 17 cm ang haba (para sa dalas ng 433 MHz) at ihinang ang mga ito sa mga contact na "ant" ng mga module.


Kaya, ang resulta ay isang napaka-nakaaaliw na laruan para sa mga bata at matatanda - ang PVC mat track ay nagbibigay ng mahusay na pagkakahawak sa anumang ibabaw, kaya ang makina ay madaling malampasan ang mga hadlang. Kasama rin sa mga bentahe ng sinusubaybayang bersyon ang kadalian ng kontrol - hindi na kailangang mag-install ng karagdagang mga mekanismo ng pagpipiloto, ang lahat ng kontrol ay nangyayari lamang sa pamamagitan ng pagbabago ng direksyon ng pag-ikot ng mga track. Ang kawalan ng inilarawan na disenyo ng chassis ay maaaring tawaging maliit na "ground clearance" - ang mga motor ay matatagpuan sa ilalim at kumukuha ng maraming espasyo doon, gayunpaman, hindi ito nakakasagabal sa kasiyahan ng "pagmamaneho", at kung ninanais, ang kawalan na ito ay maaaring alisin sa pamamagitan ng pagdaragdag ng karagdagang ehe para sa mga gulong sa likuran at paglalagay ng mga motor sa itaas. Maligayang gusali!











